ERTL組込みリアルタイムシステム研究室
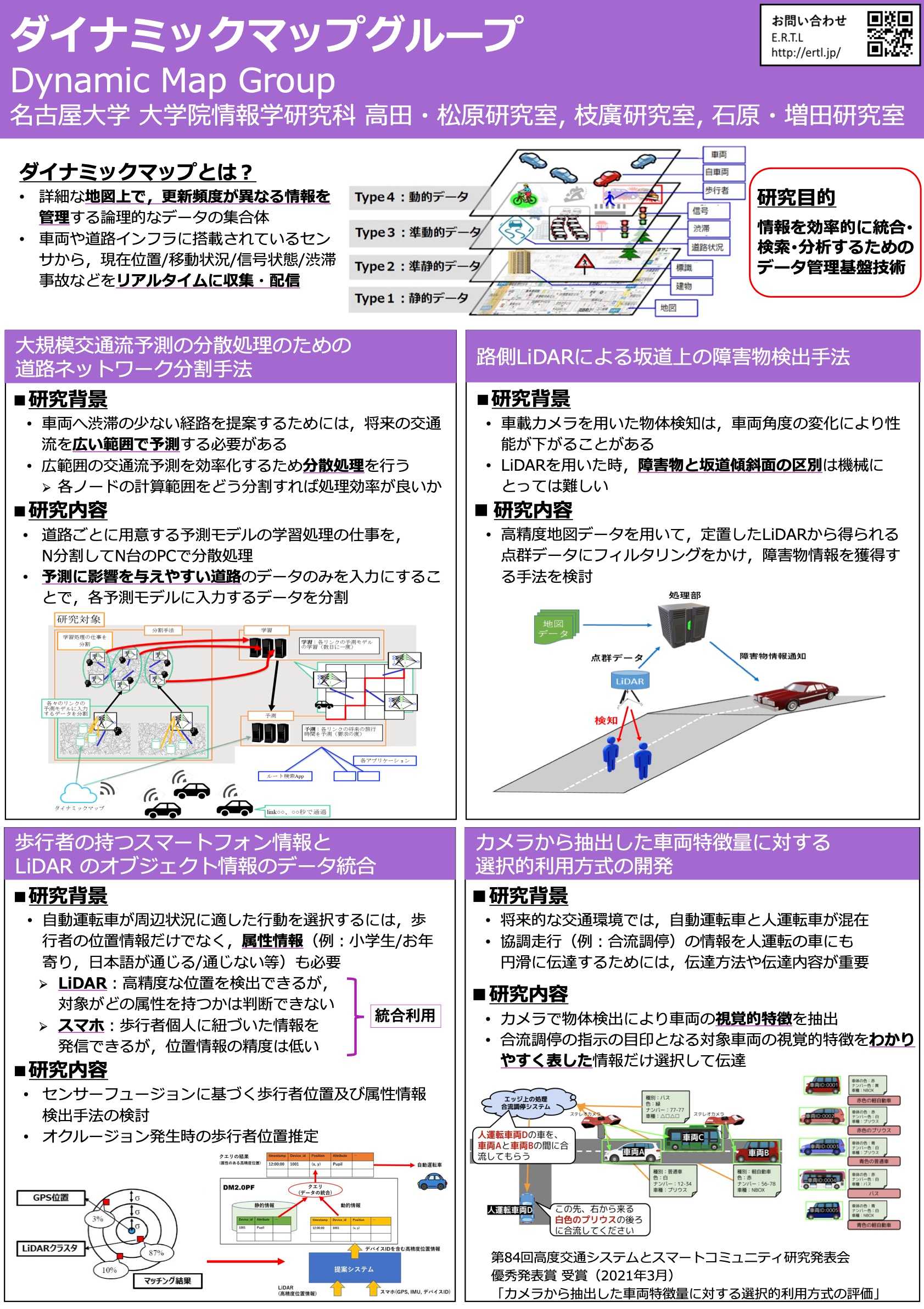
ダイナミックマップグループ
自動車やスマホなど、多数のセンサ・カメラを積んだデバイスが街中に溢れるようになっており、そこから得られる大量の情報を効率的に統合・検索・分析するためのデータ管理基盤技術について研究しています。
研究トピック
- 分散協調センサフュージョンシステムの開発
- カルマンフィルタによる近距離物体移動予測
- 空間データおよびグラフデータの検索効率化
構成メンバー
教員
- 高田 広章
- 渡辺 陽介
- 山田 峻也
学生
- 陶 璐
- 陳 啓陽
- 大畑 幸志郎
- 大久保 光真
- 郭 徳端
- 安富 友香