ERTL組込みリアルタイムシステム研究室
ダイナミックマップグループ
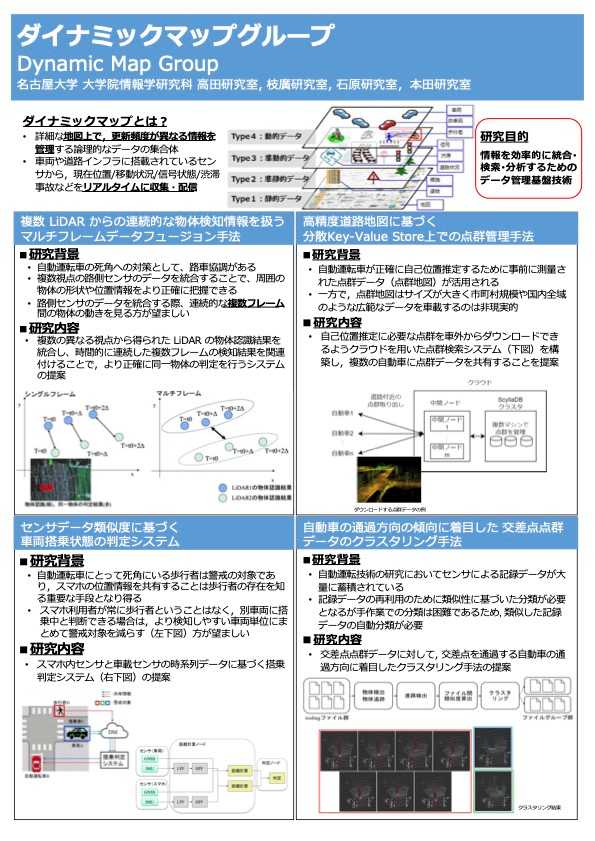
ダイナミックマップグループでは、次世代の知的モビリティシステムに向けたデータ管理およびデータフュージョン技術の研究を行っています。 自動車やスマートフォンなど、多様なセンサやカメラを搭載したデバイスが街中に広がる中、現実世界で取得されるデータ量は急速に増大しています。 私たちは、こうした大規模かつ分散的なセンサデータを効率的に統合・分析・活用するための基盤技術の確立を目指しています。
研究トピック
- 分散協調センサフュージョンシステム
- 複数LiDARからの物体検知情報向けマルチフレームデータフュージョン
- NoSQLを用いた車両クラウド間 点群検索システムの実装と評価
- 路車協調による自動ラベリングシステム
- 車両周辺の環境情報を考慮した信号交差点における車両軌跡予測
- 路車協調におけるデータフュージョン対象の位置に応じた動的選択
構成メンバー
教員
- 高田 広章
- 渡辺 陽介
- 山田 峻也
学生
- 西原 匠寅
- 安江 優一郎
- 平野 学宜
- 長尾 栞汰
- 西岡 勇飛
- 羽多野 開斗
- 武田 京馬