- Software-Defined Vehicles: Challenges and Orchestrating Mixed-Criticality Services Using Lingua Franca
Wenhung Kevin Huang, Yoshinori Terazawa, Yutaka Matsubara, Akihito Iwai, IEEE Embedded Systems Letters, 2025.
- Towards a Linux-based Unikernel for Resource-Constrained Embedded Systems
Yoshifumi Shu, Yutaka Matsubara, Yixiao Li, Hiroaki Takada, OSPERT 2025, Belgium, pp.23-27, Jul 2025.
- GLACI: Arbitrary Code Instrumentation Tool for OpenGL
Shotaro Tsuboi, Yixiao Li, Yutaka Matsubara, Hiroaki Takada, ICONS 2025, France, Mar 2025. Best Paper Award.
- Monitor and Analyze Rare ROS2 Performance Issues with A Unified Tracing Framework
Yixiao Li, Yutaka Matsubara, Hiroaki Takada, Satoru Funahashi, Hiroki Kawashima, WSSE 2024, Kyoto, Aug 2024.
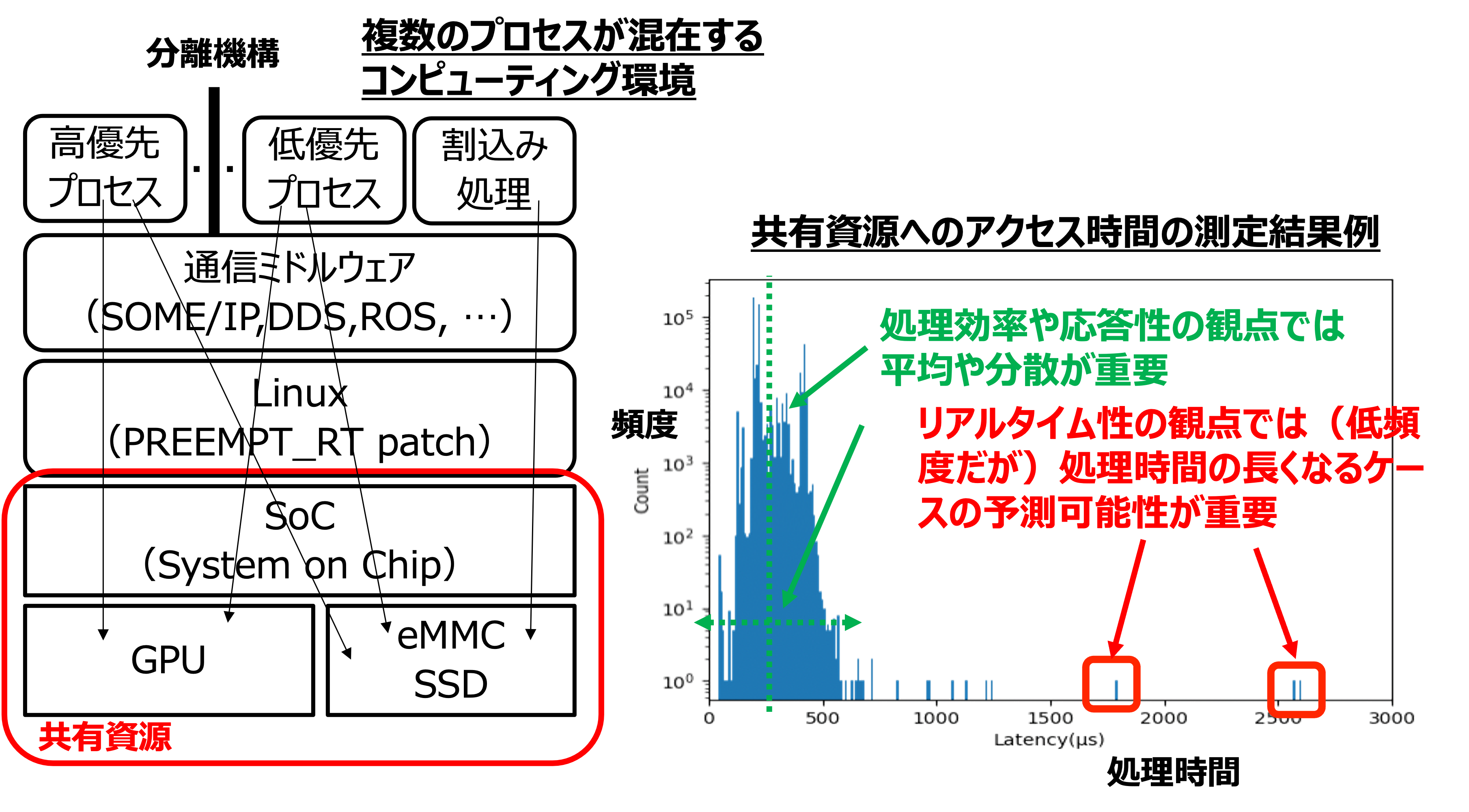
- A Performance Evaluation of Embedded Multi-core Mixed-criticality System Based on PREEMPT_RT Linux
Yixiao Li, Yutaka Matsubara, Hiroaki Takada, Kenji Suzuki, Hideaki Murata, Journal of Information Processing, Vol.31, pp.78-87, 2023.
- Design and Implementation of RTOS-Aware Control-Flow Integrity Mechanism for Microcontroller-Based Systems
Tomoaki Kawada, Shinya Honda, Yutaka Matsubara, Hiroaki Takada, Computer Software, Vol.39, No.2, 2022.
- SPIKE-RT: A Real-Time Software Platform for LEGO SPIKE Prime
Yixiao Zhu, Yixiao Li, Yutaka Matsubara, Shinya Honda, IPSJ EMB-61, 2022.
- Improving Responsiveness by Guaranteeing Storage I/O Bandwidth in the BFQ Scheduler
Hiroki Hasegawa, Yutaka Matsubara, Toshikazu Kato, Hitoshi Yamamoto, Takehisa Mizuguchi, Hiroaki Takada, ETNET 2022.
- TZmCFI: RTOS-Aware Control-Flow Integrity Using TrustZone for Armv8-M
Tomoaki Kawada, Shinya Honda, Yutaka Matsubara, Hiroaki Takada, International Journal of Parallel Programming, Vol.49, pp.136-150, 2020.
- A Comparative Analysis of RTOS and Linux Scalability on an Embedded Many-core Processor
Yixiao Li, Yutaka Matsubara, Hiroaki Takada, Journal of Information Processing, Vol.26, pp.225-236, 2018.